matlab中求解线性方程组
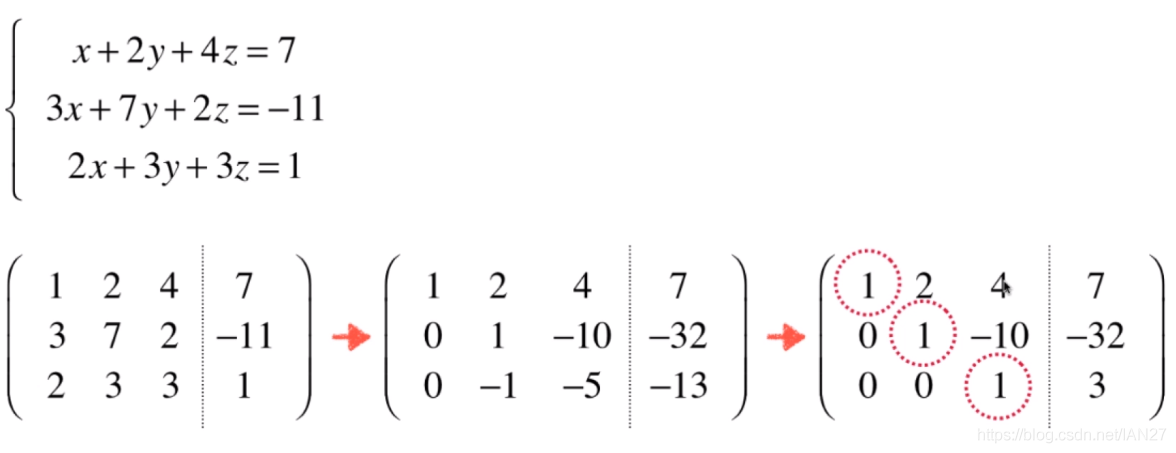
在线性代数的课程中,我们学习过求解一个线性方程组,可以将方程组写成一个矩阵,然后用初等行变换进行求解。例如:
高斯消去法(Gaussian Elimination)和高斯约旦消去法(Gauss-Jordan Elimination)
上述图片的步骤就是高斯消元法。我们通过矩阵中 1.行间的交换2.行间的加减3.行的倍数 这三种变换,将矩阵变成一个上三角矩阵,然后将最后一行的解带入方程,一个一个回代求出所有的解。不过在计算机里,我们不能手动回代求解,所以我们可以让计算机继续简化这个矩阵,仍然用行变换的规则,将矩阵变成对角矩阵,这样解就都出来了,这就是高斯约旦消元法,实际上就是在高斯消元法的基础上继续往下做而已。
可以参看这篇博文,有图,很详细.
rref()
在matlab中,可以使用rref方法求解线性方程组,且rref函数用的方法是高斯约旦消元法。
1
2
3
4
| A = [1 2 1; 3 5 6; 4 5 2;];
b = [4 7 9]';
format rat
r =rref([A b])
|
LU Factorization
在我们求 Ax=b 时,如果A非常复杂,那么直接求x比较困难,即使使用高斯消元法,可能要做好多次变换,这就造成计算量大,那么我们可不可以规避大的计算量,尽量用矩阵乘法来解决这个问题呢?LU分解法(LU Factorization)就可以做到。
LU分解法的主要思想如下:
- 在求解 Ax=b 时,我们先将 A=LU,L是一个下三角矩阵,U是一个上三角矩阵,于是 Ax=b 转化成 LUx=b→L(Ux)=b
- 然后我们令 Ux=y
- 所以我们把 问题转化为两个步骤:
- 求解 Ly=b 中的 y
- 解的 y 后,求解 Ux=y 中的 x
第三点的两步都很简单,因为L和U都是三角矩阵,相当于给你做好了高斯消元法,所以很容易通过高斯消元法的回代得到解。那么关键就在于如何得到L和U。
我们可以一步一步的将矩阵A消成上三角矩阵U!
即:
L1L2L3…LmA=U
L=L1L2L3…Lm
给出一个例子:
有矩阵A:
A=⎣⎡124136158⎦⎤
先找一个下三角矩阵L1,使得A的第二三行第一个元素为0:
L1∗A=⎣⎡1ab01c001⎦⎤∗ ⎣⎡124136158⎦⎤=⎣⎡1001??1??⎦⎤
我们可以得到一组解a=-2;b=-4;c=0.
L1∗A=⎣⎡1−2−4010001⎦⎤∗ ⎣⎡124136158⎦⎤=⎣⎡100112134⎦⎤
接着我们要找一个L2,使得A的第三行第二个元素为0:
L2∗(L1∗A)=⎣⎡10001d001⎦⎤∗ ⎣⎡100112134⎦⎤=⎣⎡10011013?⎦⎤
我们可以得到解d=-2.
L2∗(L1∗A)=⎣⎡10001−2001⎦⎤∗ ⎣⎡100112134⎦⎤=⎣⎡10011013−2⎦⎤
所以我们找到了U和L:
U=⎣⎡10011013−2⎦⎤;L=L1∗L2=⎣⎡1−2001−2001⎦⎤
看上去还是很麻烦对吧,但如果计算机来做,他就可以避免很多行变换的计算,反而增加了速度。
\运算符
虽然说这些算法有点小复杂,但matlab中,你可以完全不管这些原理,只要用“\”符号就可以算出x了。
1
2
3
4
5
6
7
8
| A = [1 2 1; 2 6 1; 1 1 4;];
b = [2 7 3]';
R =A\b
R =
-3
2
1
|
- 使用rref方法也可以得到,不过其返回的是一个带有对角矩阵的矩阵,最后一列是解向量。\算符可以直接得到解向量。
Cramer’s method
克莱默法则(Cramer’s method)实际就是用逆矩阵求解,而根据该法则,逆矩阵求起来非常麻烦,所以不实用,效率低下。
求Ax=b则x=A−1bA−1=det(A)1adj(A)
这里det是行列式,adj是伴随矩阵,这个伴随矩阵,在矩阵三阶及以上的时候特别难算,具体可以百科一下伴随矩阵。不过matlab中你不用考虑这些,A−1用inv(A)就可以了。
1
2
3
| A = [1 2 1; 2 6 1; 1 1 4;];
b = [2 7 3]';
R =inv(A)*b
|
然而,这是有问题的。 我们看到在求逆矩阵的时候,公式里面有一个 A−1=det(A)1 ,这就糟了,有可能 det(A)=0 哦,也就是说,不是所有矩阵都有逆矩阵。根据线代的知识,我们知道,奇异矩阵没有逆矩阵。所以综上,inv这个方法存在其局限性。
cond()
cond方法是用来判断一个矩阵的健康程度的。我们先看一个矩阵:
A=⎣⎡12024−2361⎦⎤
矩阵A就是一个奇异矩阵,因为第二行是第一行的两倍,该矩阵行列式等于0.
再看一个矩阵:
A′=⎣⎡12024.0001−2361⎦⎤
该矩阵不是一个奇异矩阵,但是大差不差,这就说明该矩阵健康程度低。那么如何用数学语言说明呢?
假如说我们对A有一个等式 Ax=b 成立,此时对A进行一个小小的改动,称为 δA,如果要让等式继续成立,那么x要有多少的改动。来分析一下:
Ax=bx=A−1b
如果A很接近一个奇异矩阵,那么小小的改动就会造成 A−1 变得很大,x就变得很大——x改动越大,说明A的健康程度越差。
我们再引入一个常数k来表征(放大)x的改动,如果A的改动需要乘以一个很大的数才能大于x的改动,那么就说明A 健康程度很差。这就是“条件数”cond()的原理。
∣∣x∣∣∣∣δx∣∣<k(A)∣∣A∣∣∣∣δA∣∣
1
2
| A = [1 2 3; 2 4 6; 9 8 7]; cond(A)
B = [1 2 3; 2 4.0001 6; 9 8 7]; cond(B)
|
线性系统(linear system)
线性系统是线性方程组对立的一面。如果收线性方程组是要求解Ax=b,那么线性系统就是要要讨论和分析y=A*b中A怎么影响y。
特征值和特征向量
A∗b 两个矩阵相乘有些复杂,为研究线性系统,我们要尝试简化这个式子,那么能不能找到一个常数 λ和一个向量v,使 A∗v=λ∗v,这就是特征值和特征向量了。
同时,b这个向量可以被分解 b=v1+v2+v3+⋯+vn,那么:
A∗b=A∗(v1+v2+⋯+vn)=λ1∗v1+⋯+λn∗vn
于是,一个系统A对向量b的影响找到了,实际上就是表达成b在各个分量上的伸缩倍率。那么系统对一个向量组成的平面,实际上就有了固定的影响。
eig()
使用eig方法可以找到矩阵A的特征值和特征向量:
1
2
| A=[2 -12; 1 -5];
[V D]=eig(A) # V是特征向量,D是特征值,在矩阵对角线上。
|
此小节结束,你真厉害!