matlab中的图像处理
(台湾人好像把图片称作影像捏)
imread() & imshow()
要对图片进行处理,当然第一步是读入图片了。matlab中使用imread方法读入图片,图片在matlab中将以矩阵的方式呈现。
读入之后,可以使用imshow方法显示读入的图片。
1
2
3
| img1=imread('test image/lena.tif');
figure
imshow(img1)
|
whos
关键字whos可以把现在工作区中的变量详细的展示出来,例如对于图片来说,whos可以显示变量的名字,它的size、数据类型以及它的占用空间大小。如果要展示简单的信息则使用关键字who。
对于图片类型来说,使用imageinfo方法可以更加详细且有针对性地展示某个图片的信息。而imtool方法则会为用户弹出一个内置的工具界面,里面可以使用图形化的按钮去对图片进行处理。
1
2
| imageinfo('test image/lena.tif')
imtool('test image/lena.tif')
|
处理方法
immultiply()
immultiply方法的作用是将图像的亮度整体乘以一个常数。可以将图像变亮变暗。
1
2
3
4
5
| img1=imread('test image/lena.tif');
img2=immultiply(img1, 1.5);
figure
subplot(1,2,1); imshow(img1);
subplot(1,2,2); imshow(img2);
|

imadd()
imadd方法是将两张图像相叠加。但是同样的,由于图像叠加后,整体的亮度对于两张原图来说都提升了,所以将会变亮。
1
2
3
4
5
6
7
| img1=imread('test image/lena.tif');
img2=imread('test image/plane.tif');
img4=imadd(img1, img2);
figure
subplot(1,3,1); imshow(img1);
subplot(1,3,2); imshow(img2);
subplot(1,3,3); imshow(img4);
|

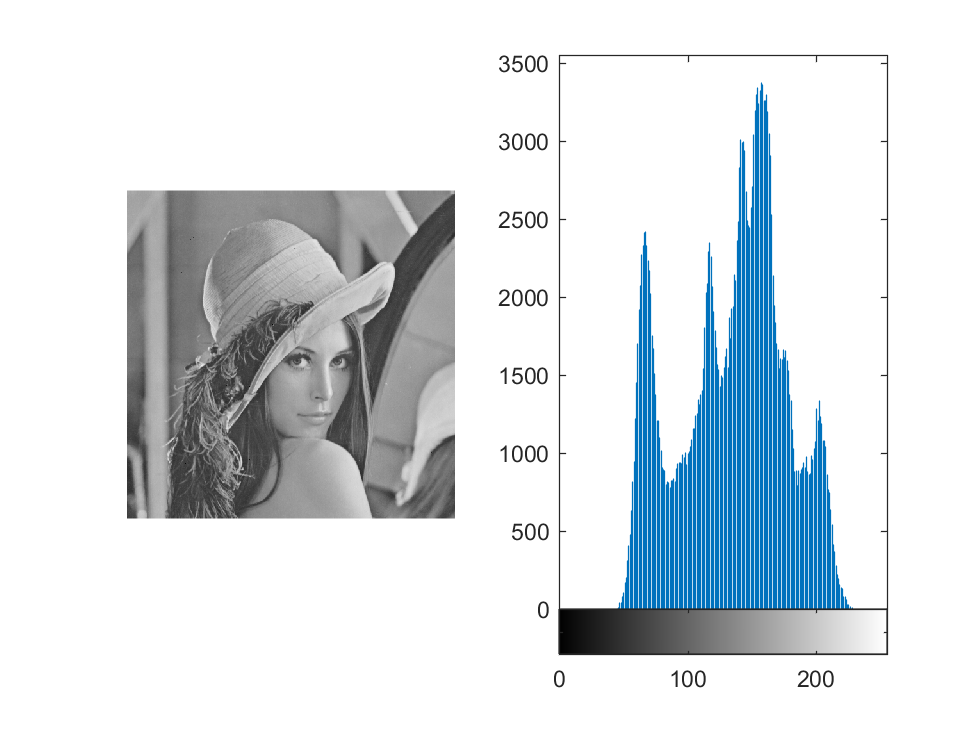
imhist()
imhist可以展示出图片的直方图。
1
2
| subplot(1,2,1); imshow(img1);
subplot(1,2,2);imhist(img1);
|
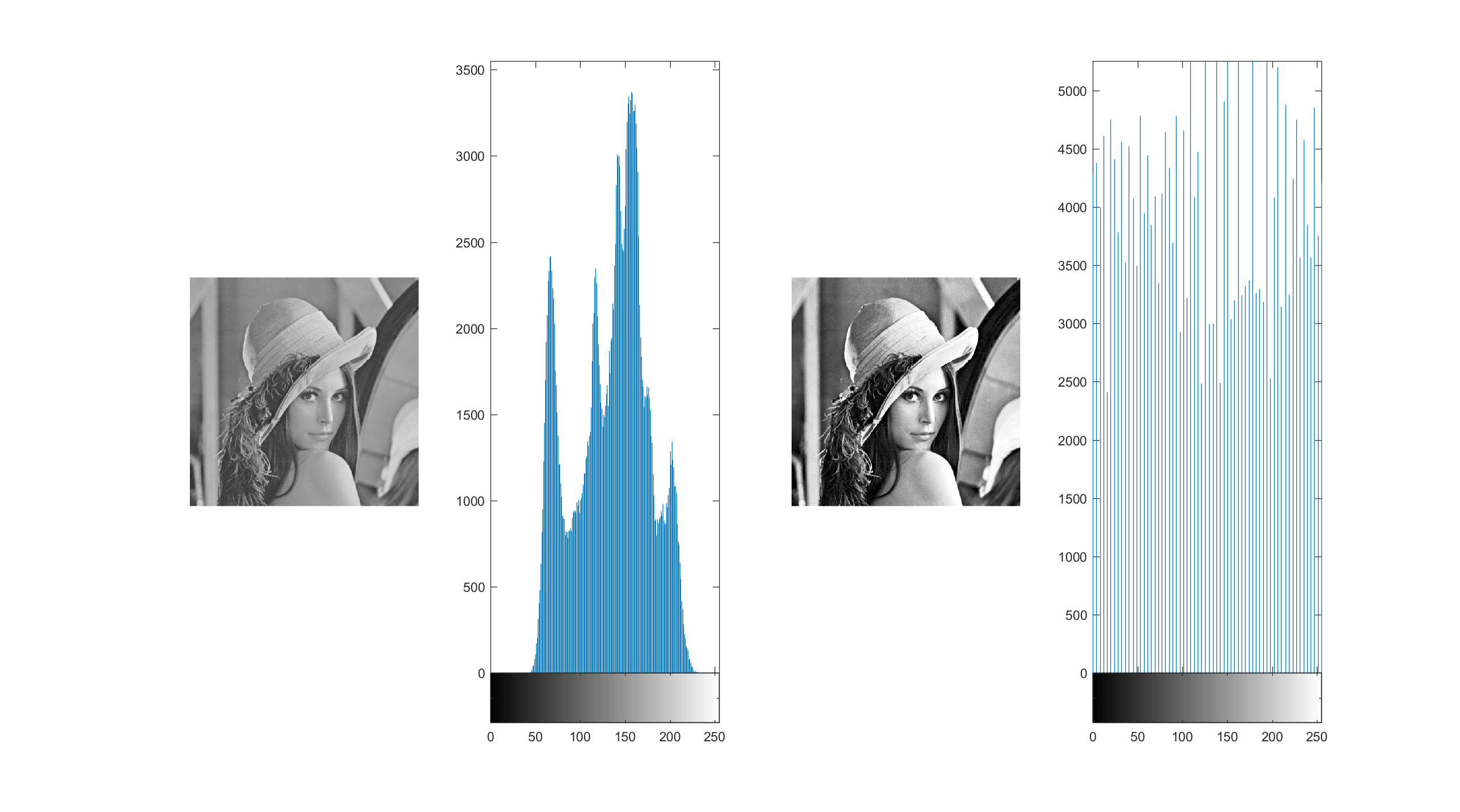
histeq()
histeq方法是对直方图做均衡化。这样原图灰度相差就会变大,形成一种对比度变大的感觉。
1
2
3
4
5
| subplot(1,4,1); imshow(img1);
subplot(1,4,2); imhist(img1);
img1eq=histeq(img1);
subplot(1,4,3); imshow(img1eq);
subplot(1,4,4); imhist(img1eq);
|
myhisteq()
在课程中,老师让同学自己用代码实现一下直方图均衡化,在知道数学原理和算法之后,这个练习也并不复杂,但是步骤还是比较多的,这里给出一个下一篇博客的链接,在那里我会更加详细地完成这个练习。直方图均衡化
常见的几何变换共有以下几种:
- 平移(translation)
- 放缩/拉伸(scale)
- 旋转(rotation)
- 切变(shear)
- 透视(perspective)
每一个几何变换对应一个变换矩阵。
scale
scale的变换矩阵为:
[Sx00Sy]
作用到像素点:
[x′=Sxxy′=Syy]=[Sx00Sy][xy]
rotation
rotation有两种变换方向,顺时针和逆时针,当然两者本质上是互通的。逆时针旋转的变换矩阵为:
[cosθsinθ−sinθcosθ]
顺时针旋转的变换矩阵为:
[cosθ−sinθsinθcosθ]
给出推导过程:
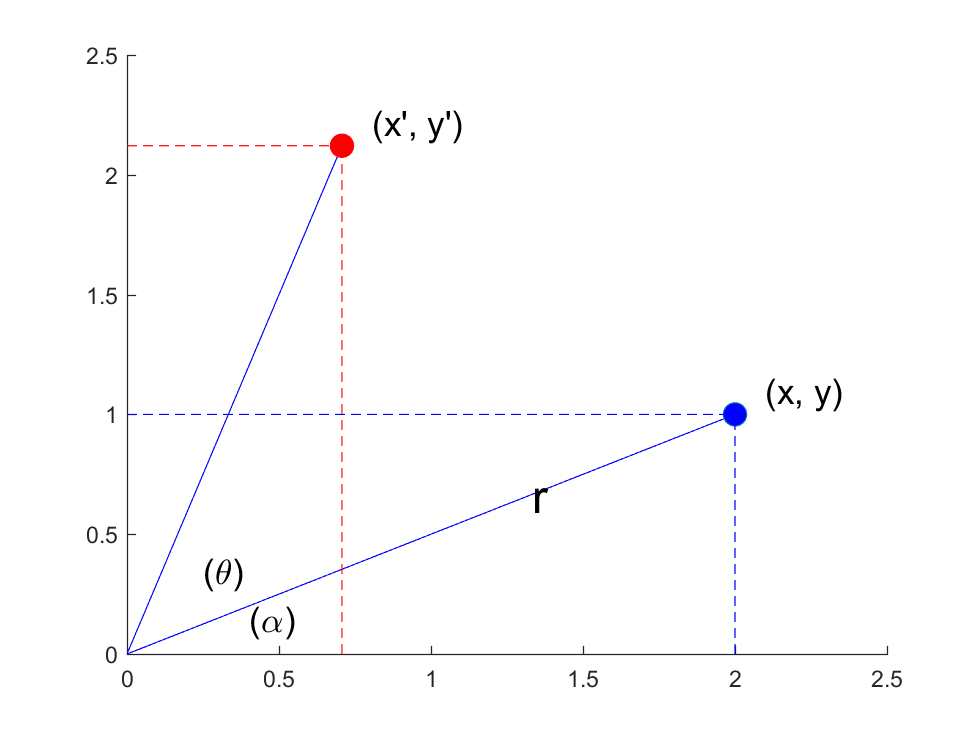
设初始点为 (x,y) ,旋转后点为 (x′,y′),半径为 r ,旋转矩阵为 [acbd] 初始夹角为 α ,旋转角为 θ。则可以列式:
[acbd][xy]=[x′y′]
(x,y)=(rcosα,rsinα)(x′,y′)=(rcos(α+θ),rsin(α+θ))
带入得联立方程式:
{arcosα+brsinα=rcos(α+θ)crcosα+drsinα=rsin(α+θ)
化简、展开
{acosα+bsinα=cos(α)cos(θ)−sin(θ)sin(α)ccosα+dsinα=sin(α)cos(θ)+cos(θ)cos(α)
所以:
a=cosθ;b=−sinθ;c=sinθ;d=cosθ
顺时针情况下类似。值得一提的是,在matlab中有一个内置的函数imrotate(),其默认是顺时针方向旋转。
shear
shear的变换矩阵为:
[1hyhx1]
translation
终于讲到最简单却也是最特殊的变换,平移了。平面中,如果我们仍然要通过左乘变换矩阵的方式进行变换,那么平移的变换矩阵必须是三阶的
translation的变换矩阵为:
⎣⎡100010txty1⎦⎤
作用到像素点:
⎣⎡x′=x+txy′=y+ty1⎦⎤=⎣⎡100010txty1⎦⎤⎣⎡xy1⎦⎤
我曾经深刻地思考过这个问题,为什么就平移非得用三阶矩阵表示呢。最后我想到了一种解释。
拿一个矩形为例子,其实除了平移以外的变化,都是对这个矩形自身的改变,我们不用考虑到其他物体,只需要对这个矩形自身放大缩小旋转拉伸即可,而平移不是,平移是要有参照物的,需要考虑的是一种空间位置关系,没有别的参照物,你怎么知道它“平移”了?所以,第三维实际上就是潜在地给这个矩形加了一个坐标系,让它处于三维的“环境空间”中了。其实可以把第三维的1看成高度,现在这个矩形,默认处在空间中,其与xOy平行,且高度值z=1,这样是不是很容易理解!
因此,为了统一所有的变换,所有变换矩阵都用三阶来表示了,这样在做乘法的时候得以统一。
scale=⎣⎡Sx000Sy0001⎦⎤;rotation=⎣⎡cosθsinθ0−sinθcosθ0001⎦⎤
shear=⎣⎡1hy0hx10001⎦⎤;translation=⎣⎡100010txty1⎦⎤
perspective
透视变换较为复杂,这里仅给出其变换矩阵:
perspective=⎣⎡adgbehcf1⎦⎤
此小节结束,你真厉害!